-
1 computerized typesetting
1) Техника: набор с помощью ЭВМ2) Полиграфия: набор с помощью компьютера3) Деловая лексика: автоматизированный набор, набор с помощью вычислительной машиныУниверсальный англо-русский словарь > computerized typesetting
-
2 computer typesetting
1) Компьютерная техника: автоматизированный набор, набор с помощью ЭВМ2) Полиграфия: набор с помощью компьютера3) Реклама: компьютерный набор -
3 computer-aided
прил.эк. автоматизированный, компьютеризированный ( работающий при помощи компьютера)computer-aided instruction [learning, training\] — обучение с помощью компьютера
Syn:See: -
4 CAT
1. catamaran - катамаран;2. CATERPILLAR - американская компания "Катерпиллар";3. cathode - катод;4. cation - катион;5. chemical addition tank - бак химических присадок;6. chloramphenicol acetyl transferase - хлорамфеникол-ацетилтрансфераза;7. component acceptance test - приемосдаточные испытания компонентов;8. computer aided testing - автоматизированный контроль;9. computer analysis of transistors - автоматизированный анализ характеристик транзисторов;10. computer assisted teaching - машинное обучение;11. computer-aided teaching - компьютерное обучение; обучение с использованием ЭВМ;12. computer-aided test - автоматизированное тестирование;13. computer-aided testing - автоматизированное тестирование; автоматизированные испытания; автоматизированные испытания с помощью компьютера; автоматизированный контроль; испытание с применением ЭВМ;14. computer-aided tomography - компьютерная томография;15. computer-aided translation - автоматизированный перевод;16. computer-aided typesetter-наборная машина, управляемая компьютером; наборный автомат;17. computer-aided typesetting - автоматизированный набор;18. computer-assisted training - компьютерное обучение;19. computerized axial tomography - компьютерная осевая томография; осевая томография, управляемая от ЭВМ; рентгеновское компьютерно-томографическое исследование;20. conditionally accepted tag - бирка об условной приемке;21. construction appraisal team - группа оценки строительства;22. cooled-anode tube - лампа с охлаждаемым анодом;23. crack arrest technology - технология прекращения развития трещины;24. crack arrest temperature - температура остановки трещины;25. crack arrest test - испытание на прекращение развития трещины;26. current-adjusting type device - регулируемый током прибор -
5 Ip
- точка [место] идентификации
- степень защиты (обеспечиваемая оболочкой)
- сетевой протокол Интернета
- протокол управления передачей (в информационных технологиях)
- протокол управления передачей (в электросвязи)
- протокол управления передачей (в вычислительных сетях)
- протокол Интернета
- промежуточное давление
- поставщик информации
- показатель производительности
- обработка изображения
- начальная перестановка (в DES-алгоритме)
- межперсональный
- исходная точка
- источник информации (в видеотексных системах)
- Интернет-протокол
- Интернет протокол
- интеллектуальная собственность
- Институт нефти (США)
- включающая способность при коротком замыкании, Ip
включающая способность при коротком замыкании, Ip
-Тематики
- аппарат, изделие, устройство...
- выключатель автоматический
- выключатель, переключатель
EN
Интернет-протокол
Межсетевой протокол пакетной передачи, который: - работает с 32-битовыми адресами, обеспечивает адресацию и маршрутизацию пакетов в сети; - работает без установления соединения, не обеспечивает сохранение порядка следования пакетов, не гарантирует доставку пакетов.
[ ГОСТ Р 54456-2011]Тематики
- телевидение, радиовещание, видео
EN
интеллектуальная собственность
Владение чем-либо (авторскими правами, патентом, художественной разработкой), что является продуктом творческой или умственной деятельности правообладателя.
[ http://www.morepc.ru/dict/]
интеллектуальная собственность
ИС
Нематериальные активы в виде товарных знаков, знаков обслуживания, совокупности элементов оформления товара, фирменных наименований, доменных имен и авторских прав.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
интеллектуальная собственность
Совокупность исключительных прав на результаты интеллектуальной деятельности, а также на приравненные к ним средства индивидуализации. И.с. – это собирательное понятие, охватывающее права на: результаты интеллектуальной (творческой) деятельности в области литературы, искусства, науки и техники, а также в других областях творчества; средства индивидуализации участников гражданского оборота товаров или услуг; защиту от недобросовестной конкуренции. Использование результатов интеллектуальной деятельности и средств индивидуализации, которые являются объектом исключительных прав (интеллектуальной собственности) гражданина или юридического лица, осуществляется только с согласия правообладателя на основе лицензионных и авторских договоров. См. также Промышленная собственность.
[ http://slovar-lopatnikov.ru/]EN
intellectual property (IP)
Intangible assets such as trademarks, service marks, trade dress, trade names, domain names and copyrights.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
Синонимы
- ИС
EN
интернет-протокол
Протокол сетевого уровня из стека TCP/IP для сетевой связи без установления соединения. Протокол обеспечивает адресацию, указание типа обслуживания пакетов ToS (type-of-service), фрагментацию, сборку и защиту передачи. Определен в RFC 791 (МСЭ-Т T.808, RFC 791).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
интернет-протокол
Стандартный протокол, определяющий дейтаграмму, которая обеспечивает базу для доставки пакетов без установления соединения.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Тематики
- релейная защита
- электросвязь, основные понятия
EN
источник информации (в видеотексных системах)
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
источник информации (в видеотексных системах)
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
межперсональный
(МСЭ-Т F.400/ Х.400).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
начальная перестановка (в DES-алгоритме)
НП
—
[[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]]Тематики
Синонимы
- НП
EN
обработка изображения
Процесс создания, редактирования и хранения изображений с помощью компьютера.
[ http://www.morepc.ru/dict/]Тематики
EN
показатель производительности
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
поставщик информации
контент-провайдер
Организация, служба или частное лицо, оказывающие различного рода информационные услуги, например, осуществляющие информационное наполнение веб-сайтов, выступающие в качестве источника информации общего пользования (сводки погоды и т.п.) или предоставляющие специального вида данные (о ближайшей аптеке, заторах дорожного движения) в сетях мобильной связи.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
Синонимы
EN
промежуточное давление
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
протокол Интернета
Протокол сетевого уровня из стека TCP/IP для сетевой связи без установления соединения. Протокол обеспечивает адресацию, указание типа обслуживания пакетов ToS (type-of-service), фрагментацию, сборку и защиту передачи. Определен в RFC 791.
[ http://www.lexikon.ru/sputnik.html]Тематики
- электросвязь, основные понятия
EN
протокол управления передачей
протокол Internet
Известен также как стек протоколов Internet (Internet Protocol Suite). Данный стек протоколов используется в семействе сетей Internet и для объединения гетерогенных сетей. Стек протоколов TCP/IP был разработан в ARPA как часть операционной системы UNIX, а впоследствии был адаптирован в качестве сетевого стандарта для различных сред.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
Синонимы
EN
протокол управления передачей
межсетевой протокол
Платформонезависимый набор протоколов для коммуникации в глобальных вычислительных сетях.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
протокол управления передачей
протокол интернета
стек TCP/IP
межсетевой протокол
IP
Сетевые протоколы, обеспечивающие взаимодействие в межсоединенных подсетях (включая Интернет и интранет), состоящих из компьютеров с различной архитектурой и разными операционными системами.
(МСЭ-Т J.280).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
Синонимы
- IP
- межсетевой протокол
- протокол интернета
- стек TCP/IP
EN
сетевой протокол Интернета
Основной сетевой протокол (L3) интернет-сетей, обеспечивающий адресацию узлов сети и маршрутизацию пакетов к адресату.
Основной протокол, обеспечивающий коммуникации в Internet. IP-адрес представляет собой цифровой адрес, состоящий из четырех чисел, разделенных точками. Каждый IP-адрес однозначно определяет компьютер в сети Internet. Для более легкого доступа к компьютеру обычно используют его доменное имя [http://www.webxpert.ru/slovar.html].
[ http://www.morepc.ru/dict/]Тематики
EN
точка [место] идентификации
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
степень защиты
Способ защиты, обеспечиваемый оболочкой от доступа к опасным частям, попадания внешних твердых предметов и (или) воды и проверяемый стандартными методами испытаний.
[ ГОСТ 14254-96( МЭК 529-89)]
степень защиты, обеспечиваемая оболочкой (IP)
Числовые обозначения после кода IP, которые в соответствии с МЭК 60529 [12] характеризуют оболочку электрооборудования, обеспечивающую:
- защиту персонала от прикасания или доступа к находящимся под напряжением или движущимся частям (за исключением гладких вращающихся валов и т.п.), расположенным внутри оболочки;
- защиту электрооборудования от проникания в него твердых посторонних тел и,
- если указано в обозначении, защиту электрооборудования от вредного проникания воды.
[ ГОСТ Р МЭК 60050-426-2006]EN
degree of protection of enclosure
IP (abbreviation)
numerical classification according to IEC 60529 preceded by the symbol IP applied to the enclosure of electrical apparatus to provide:
– protection of persons against contact with, or approach to, live parts and against contact with moving parts (other than smooth rotating shafts and the like) inside the enclosure,
– protection of the electrical apparatus against ingress of solid foreign objects, and
– where indicated by the classification, protection of the electrical apparatus against harmful ingress of water
[IEV number 426-04-02 ]FR
degré de protection procuré par une enveloppe
IP (abréviation)
classification numérique selon la CEI 60529, précédée du symbole IP, appliquée à une enveloppe de matériel électrique pour apporter:
– une protection des personnes contre tout contact ou proximité avec des parties actives et contre tout contact avec une pièce mobile (autre que les roulements en faible rotation) à l'intérieur d'une enveloppe
– une protection du matériel électrique contre la pénétration de corps solide étrangers, et
– selon l’indication donnée par la classification, une protection du matériel électrique contre la pénétration dangereuse de l’eau
[IEV number 426-04-02 ]Элементы кода IP и их обозначения по ГОСТ 14254-96( МЭК 529-89)
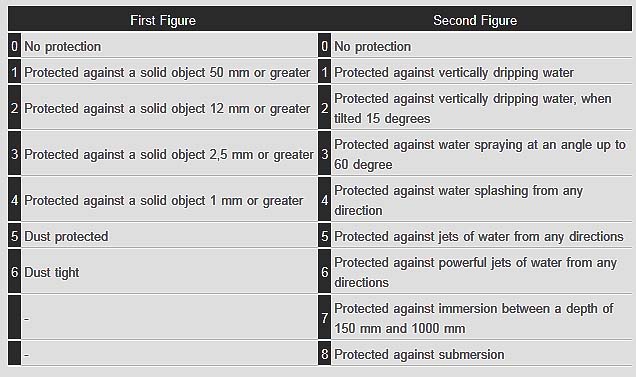
Цифры кода IP
Значение для защиты оборудования от проникновения внешних твердых предметов
Значение для защиты людей от доступа к опасным частям
Первая характеристическая цифра
0
Нет защиты
Нет защиты
1
диаметром ≥ 50 мм
тыльной стороной руки
2
диаметром ≥ 12,5 мм
пальцем
3
диаметром ≥ 2,5 мм
инструментом
4
диаметром ≥ 1,0 мм
проволокой
5
пылезащищенное
проволокой
6
пыленепроницаемое
проволокой
От вредного воздействия в результате проникновения воды
Вторая характеристическая цифра
0
Нет защиты
-
1
Вертикальное каплепадение
2
Каплепадение (номинальный угол 15°)
3
Дождевание
4
Сплошное обрызгивание
5
Действие струи
6
Сильное действие струи
7
Временное непродолжительное погружение
8
Длительное погружение
Дополнительная буква (при необходимости)
-
От доступа к опасным частям
A
тыльной стороной руки
B
пальцем
C
инструментом
проволокой
Вспомогательная буква (при необходимости)
Вспомогательная информация относящаяся к:
-
H
высоковольтным аппаратам
M
состоянию движения во время испытаний защиты от воды
S
состоянию неподвижности во время испытаний защиты от воды
W
Требования в части стойкости оболочек и электрооборудования в целом к климатическим, механическим внешним воздействующим факторам (ВВФ) и специальным средам (кроме проникновения внешних твердых предметов и воды) установлены вне рамок настоящего стандарта.
Параллельные тексты EN-RU
The code IP indicates the degrees of protection provided by an enclosure against access to hazardous parts, ingress of solid foreign objects and ingress of water.
The degree of protection of an enclosure is identified, in compliance with the specifications of the Standard IEC 60529, by the code letters IP (International Protection) followed by two numerals and two additional letters.
The first characteristic numeral indicates the degree of protection against ingress of solid foreign objects and against contact of persons with hazardous live parts inside the enclosure.
The second characteristic numeral indicates the degree of protection against ingress of water with harmful effects.
[ABB]Код IP обозначает степень защиты, обеспечиваемую оболочкой от попадания внутрь твердых посторонних предметов и воды.
Степень защиты оболочки обозначается в соответствии со стандартом МЭК 60529 буквенным обозначением IP (International Protection, т. е. Международная защита) после которого следуют две цифры, к которым в некоторых случаях добавляются еще две буквы.
Первая характеристическая цифра обозначает степень защиты от проникновения твердых посторонних предметов и от контакта людей с находящимися внутри оболочки опасными токоведущими частями.
Вторая характеристическая цифра обозначает степень защиты оболочки с точки зрения вредного воздействия, оказываемого проникновением воды.
[Перевод Интент]The protection of enclosures against ingress of dirt or against the ingress of water is defined in IEC529 (BSEN60529:1991). Conversely, an enclosure which protects equipment against ingress of particles will also protect a person from potential hazards within that enclosure, and this degree of protection is also defined as a standard.
The degrees of protection are most commonly expressed as ‘IP’ followed by two numbers, e.g. IP65, where the numbers define the degree of protection. The first digit shows the extent to which the equipment is protected against particles, or to which persons are protected from enclosed hazards. The second digit indicates the extent of protection against water.
The wording in the table is not exactly as used in the standards document, but the dimensions are accurateIP Degree of Protection according to EN/IEC 60529
Correlations between IP (IEC) and NEMA 250 standards
IP10 -> NEMA 1
IP11 -> NEMA 2
IP54 -> NEMA 3 R
IP52 -> NEMA 5-12-12 K
IP54 -> NEMA 3-3 S
IP56 -> NEMA 4-4 X
IP67 -> NEMA 6-6 P[ http://electrical-engineering-portal.com/ip-protection-degree-iec-60529-explained]
Тематики
- безопасность машин и труда в целом
- электробезопасность
- электротехника, основные понятия
Действия
- степень защиты
- степень защиты, обеспечиваемая оболочкой
- степень защиты, обеспечиваемая оболочкой (код IP)
EN
- amount of protection
- degree of protection IP
- degree of protection of an enclosure
- degree of protection of enclosure
- degree of protection provided by enclosure
- enclosure rating
- ingress protection rating
- IP
- IP degree of protection,
- IP rating
- IP Sealing Specification
- IP security
- IPSec
- level of protection
- mechanical rating
- protection
- protection index
- protection rating
DE
- IP-Schutzgrad, m
- Schutzart des Gehäuses, f
FR
3.1.12 Интернет протокол (Internet Protocol; IP): Межсетевой протокол пакетной передачи, работает с 32 битовыми адресами, обеспечивает адресацию и маршрутизацию пакетов в сети; работает без установления соединения, не обеспечивает сохранение порядка следования пакетов, не гарантирует доставку пакетов.
Источник: ГОСТ Р 53531-2009: Телевидение вещательное цифровое. Требования к защите информации от несанкционированного доступа в сетях кабельного и наземного телевизионного вещания. Основные параметры. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > Ip
-
6 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
7 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
8 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
9 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
10 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
11 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
12 base de données
база данных
БД
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования данными, независимая от прикладных программ.
[ ГОСТ 20886-85]
база данных
БД
Набор данных, который достаточен для установленной цели и представлен на машинном носителе в виде, позволяющем осуществлять автоматизированную переработку содержащейся в нем информации.
[ГОСТ 7.73-96]
база данных
Совокупность взаимосвязанных данных, организованных в соответствии со схемой базы данных таким образом, чтобы с ними мог работать пользователь
[ ГОСТ 34.320-96]
база данных
Совокупность данных, организованных в соответствии с концептуальной структурой, описывающей характеристики этих данных и взаимоотношения между ними.
[ ГОСТ Р 52653-2006]
база данных
Организованная в соответствии с определенными правилами и поддерживаемая в памяти компьютера совокупность данных, характеризующая актуальное состояние некоторой предметной области и используемая для удовлетворения информационных потребностей пользователя.
[ ГОСТ Р 52438-2005]
база данных
Совокупность хранимых данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой.
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
база данных
Набор хранящихся вместе данных, обслуживаемый СУБД.
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования, независимая от прикладных программ. Является информационной моделью предметной области. Обращение к базам данных осуществляется с помощью системы управления базами данных (СУБД) [http://www.rol.ru/files/dict/internet/.
[ http://www.morepc.ru/dict/]
база данных
Совокупность хранимых в памяти компьютера данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой. Они представляют собой своеобразную информационную модель объекта (например, управляемого объекта в АСУ). Б.д., размещенная и работающая на одном компьютере, называется локальной, а на нескольких связанных между собой компьютерах – распределенной Б.д.
[ http://slovar-lopatnikov.ru/]Параллельные тексты EN-RU
Such data may be imported from DB or subject to the manual input.
[LS Industrial Systems]Необходимые данные можно импортировать из базы данных или ввести вручную.
[Перевод Интент]Тематики
- базы данных
- географические информационные системы
- информационные технологии в образовании
- менеджмент в целом
- организация данных в сист. обраб. данных
- поиск и распространение информации
- экономика
Синонимы
- БД
EN
FR
Франко-русский словарь нормативно-технической терминологии > base de données
13 data base
база данных
БД
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования данными, независимая от прикладных программ.
[ ГОСТ 20886-85]
база данных
БД
Набор данных, который достаточен для установленной цели и представлен на машинном носителе в виде, позволяющем осуществлять автоматизированную переработку содержащейся в нем информации.
[ГОСТ 7.73-96]
база данных
Совокупность взаимосвязанных данных, организованных в соответствии со схемой базы данных таким образом, чтобы с ними мог работать пользователь
[ ГОСТ 34.320-96]
база данных
Совокупность данных, организованных в соответствии с концептуальной структурой, описывающей характеристики этих данных и взаимоотношения между ними.
[ ГОСТ Р 52653-2006]
база данных
Организованная в соответствии с определенными правилами и поддерживаемая в памяти компьютера совокупность данных, характеризующая актуальное состояние некоторой предметной области и используемая для удовлетворения информационных потребностей пользователя.
[ ГОСТ Р 52438-2005]
база данных
Совокупность хранимых данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой.
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
база данных
Набор хранящихся вместе данных, обслуживаемый СУБД.
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования, независимая от прикладных программ. Является информационной моделью предметной области. Обращение к базам данных осуществляется с помощью системы управления базами данных (СУБД) [http://www.rol.ru/files/dict/internet/.
[ http://www.morepc.ru/dict/]
база данных
Совокупность хранимых в памяти компьютера данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой. Они представляют собой своеобразную информационную модель объекта (например, управляемого объекта в АСУ). Б.д., размещенная и работающая на одном компьютере, называется локальной, а на нескольких связанных между собой компьютерах – распределенной Б.д.
[ http://slovar-lopatnikov.ru/]Параллельные тексты EN-RU
Such data may be imported from DB or subject to the manual input.
[LS Industrial Systems]Необходимые данные можно импортировать из базы данных или ввести вручную.
[Перевод Интент]Тематики
- базы данных
- географические информационные системы
- информационные технологии в образовании
- менеджмент в целом
- организация данных в сист. обраб. данных
- поиск и распространение информации
- экономика
Синонимы
- БД
EN
FR
6. База данных
БД
Data base
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования данными, независимая от прикладных программ
Источник: ГОСТ 20886-85: Организация данных в системах обработки данных. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > data base
14 DB
- шарик сухого термометра
- с двойной оплёткой (о кабеле)
- распределительная коробка
- проложенный в земле
- проектные основы
- интерфейс Device Bay
- добра
- динамическое торможение
- децибел
- двойной разрыв
- база данных
- акустико-эмиссионные децибелы
база данных
БД
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования данными, независимая от прикладных программ.
[ ГОСТ 20886-85]
база данных
БД
Набор данных, который достаточен для установленной цели и представлен на машинном носителе в виде, позволяющем осуществлять автоматизированную переработку содержащейся в нем информации.
[ГОСТ 7.73-96]
база данных
Совокупность взаимосвязанных данных, организованных в соответствии со схемой базы данных таким образом, чтобы с ними мог работать пользователь
[ ГОСТ 34.320-96]
база данных
Совокупность данных, организованных в соответствии с концептуальной структурой, описывающей характеристики этих данных и взаимоотношения между ними.
[ ГОСТ Р 52653-2006]
база данных
Организованная в соответствии с определенными правилами и поддерживаемая в памяти компьютера совокупность данных, характеризующая актуальное состояние некоторой предметной области и используемая для удовлетворения информационных потребностей пользователя.
[ ГОСТ Р 52438-2005]
база данных
Совокупность хранимых данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой.
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
база данных
Набор хранящихся вместе данных, обслуживаемый СУБД.
Совокупность данных, организованных по определенным правилам, предусматривающим общие принципы описания, хранения и манипулирования, независимая от прикладных программ. Является информационной моделью предметной области. Обращение к базам данных осуществляется с помощью системы управления базами данных (СУБД) [http://www.rol.ru/files/dict/internet/.
[ http://www.morepc.ru/dict/]
база данных
Совокупность хранимых в памяти компьютера данных, относящихся к определенному объему или кругу деятельности, специально организованных, обновляемых и логически связанных между собой. Они представляют собой своеобразную информационную модель объекта (например, управляемого объекта в АСУ). Б.д., размещенная и работающая на одном компьютере, называется локальной, а на нескольких связанных между собой компьютерах – распределенной Б.д.
[ http://slovar-lopatnikov.ru/]Параллельные тексты EN-RU
Such data may be imported from DB or subject to the manual input.
[LS Industrial Systems]Необходимые данные можно импортировать из базы данных или ввести вручную.
[Перевод Интент]Тематики
- базы данных
- географические информационные системы
- информационные технологии в образовании
- менеджмент в целом
- организация данных в сист. обраб. данных
- поиск и распространение информации
- экономика
Синонимы
- БД
EN
FR
двойной разрыв
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
децибел
дБ
Логарифмическая единица измерения отношений величин. Отношения амплитуд А1/А2 представляют в децибелах в виде <А1/А2>=20 lg (А1/А2), отношение интенсивностей W1/W2-<W1/W2>=10 lg(W1/W2). Если измеряемое отношение меньше единицы, говорят об отрицательных децибелах. Значения B1 и В2, выраженные в децибелах относительно некоторой опорной величины (например, амплитуды донного сигнала), записывают в форме <B1> и <В2>.
Примечание
1 дБ соответствует изменению (увеличению или ослаблению) амплитуды в 1,12 раза, 3 дБ - в 1,41 раза, 6 дБ - в 2 раза, 20 дБ - в 10 раз, 40 дБ - в 100 раз, 60 дБ - в 1000 раз, 120 дБ - в 106 раз.
[Система неразрушающего контроля. Виды (методы) и технология неразрушающего контроля. Термины и определения (справочное пособие). Москва 2003 г.]
децибел
дБ
Единица измерения громкости или силы акустического сигнала.
[ http://www.morepc.ru/dict/]Тематики
- виды (методы) и технология неразр. контроля
Синонимы
- дБ
EN
- dB
- decibel
динамическое торможение
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
добра
Стандартная денежная единица Сан-Томе и Принсипи, состоящая из 100 сентаво.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
- dobra
- db
интерфейс Device Bay
Для подключения периферийного оборудования.
[ http://www.morepc.ru/dict/]Тематики
EN
- DB
- Device Bay
проложенный в земле
(напр. о трубопроводе, кабеле)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
распределительная коробка
-
[Интент]Тематики
EN
с двойной оплёткой (о кабеле)
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
шарик сухого термометра
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
- dry bulb
- DB
2.16 акустико-эмиссионные децибелы (dBАЭ): Логарифмическая шкала относительных величин сигналов АЭ, в которой за нулевой уровень принято значение 1 мкВ. Обозначается uдБАЭ
uдБАЭ = 20log10(u1/u0),
где u1 - амплитуда измеренного сигнала АЭ;
u0 - напряжение на выходе ПАЭ, u0 = 1 мкВ.
Ряд значений шкалы дБ имеет следующий вид:
0 дБ 1 мкВ
20 дБ 10 мкВ
40 дБ 100 мкВ
60 дБ 1 мВ
80 дБ 10 мВ
100 дБ 100 мВ
Источник: ГОСТ Р ИСО 12716-2009: Контроль неразрушающий. Акустическая эмиссия. Словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > DB
15 virtual machine
виртуальная машина
виртуальный компьютер
Виртуальный компьютер, работа которого реализуется на реальной машине с помощью специальных программных средств виртуализации.
Если не вдаваться в детали, то компьютерные системы обычно состоят из аппаратного обеспечения, операционной системы, которая работает на этом аппаратном обеспечении, и приложений, работающих в этой ОС. (Правда, во встроенных системах операционная система в традиционном понимании может отсутствовать.) Так или иначе, операционная система "знает" обо всех ресурсах и возможностях используемого оборудования и управляет им напрямую.
Если между ОС и вычислительной системой присутствует еще один программный уровень, тогда ОС получает только ту информацию, которую этот промежуточный уровень ей предоставляет. И сведения о ресурсах и возможностях используемого аппаратного обеспечения будут зависеть от этого промежуточного программного уровня. Операционная система может контролировать нижележащее оборудование только в той мере, в какой ему позволяет этот промежуточный уровень.
Промежуточный программный уровень может сообщить ОС все, что ему известно об аппаратном обеспечении, и просто передавать управляющие директивы без каких-либо изменений. Но возможно и иное решение: промежуточный уровень может не сообщать ОС все данные об имеющемся оборудовании и до определенной степени менять управляющие директивы, передаваемые ОС.
Конечно, существуют разнообразные устройства и интерфейсы, которые добавляют свои нюансы и сложности в вычислительную среду. Но использование программного уровня для формирования набора вычислительных ресурсов и правил работы и составляют основу так называемой виртуальной машины.
Виртуальная машина — это вычислительная среда, набор ресурсов и правил работы которой формируется (с помощью программного обеспечения) в некой другой вычислительной среде.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
виртуальная машина (ЭВМ)
Средство многозадачной ОС, предоставляющее каждой задаче функциональный эквивалент ЭВМ.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
виртуальный компьютер
Программное обеспечение, которое моделирует центральный процессор гипотетического компьютера. Программы, выполняемые виртуальным компьютером, представляются в байтовых кодах, которые являются элементарными операциями для данного гипотетического компьютера. (МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > virtual machine
16 cold type
компьютерный набор текста
Набор текста с помощью клавиатуры компьютера.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > cold type
17 text origination
компьютерный набор текста
Набор текста с помощью клавиатуры компьютера.
[ http://www.morepc.ru/dict/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > text origination
18 control panel
= CPпанель управления, пульт управления, ПУпервоначально - специальная панель на лицевой части компьютера, содержащая набор индикаторов, кнопок и тумблеров, с помощью которых можно было вручную производить его диагностику и управление, например записывать в ОЗУ машинные команды. В современных компьютерах панель управления - часть интерфейса пользователя, которая представлена на экране в виде набора пиктограмм утилит, позволяющих настраивать те или иные функции ОС, приложений, устройств или подсистем компьютераАнгло-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > control panel
19 Windows CE
тех. сокр.Операционная системная платформа для широкого диапазона средств связи, развлекательных и мобильно-вычислительных устройств. Платформа Windows CE сделает возможными новые категории non-PC деловых и пользовательских устройств, которые могут связываться друг с другом, разделять информацию с PC на основе Windows и подсоединяться к Интернет. Первые продукты, основанные на Windows CE, карманные ПК, начали производиться в США в ноябре 1996 года ведущими изготовителями комплектного оборудования (OEM) персональных компьютеров и пользовательской электроники. Windows CE совершенно новая компактная и мобильная операционная система, построенная для осуществления развития широкого диапазона деловых и пользовательских устройств, включая новые карманные ПК, "компьютер-бумажник", беспроводные коммуникационные устройства, такие как цифровые информационные пейджеры и сотовые телефоны, следующее поколение мультимедийных и развлекательных приставок, включая DVD проигрыватели, устройства целевого доступа в Интернет, таких как Internet TV.Самый широкий ассортимент WinCЕ-устройств, продаваемых в России, поставляет фирма Casio. Также популярны изделия Hewlett-Packard и Compaq. Объединяет их знакомый интерфейс от MS Windows, но вот все остальное отличается. Даже процессоры установлены разные, поэтому не все WinCE-приложения будут доступны покупателю конкретного устройства.Внешний вид самих КПК различается — от изящных записных книжек Casio EM-500, имеющих всего 4 кнопки и похожих на Palm, до напоминающих небольшой ноутбук HP Jornada. Экран у большинства новых моделей цветной, разрешение колеблется от 240х320 до 640х240 в зависимости от компоновки компьютера — горизонтальной или вертикальной. Поддержка 65 536 цветов (HiColor) уже стала стандартом для этого класса устройств. Набор текстов осуществляется с клавиатуры (для клавиатурных моделей) или с помощью рукописного ввода на сенсорном экране. Доступна виртуальная клавиатура.В отличие от Palm, оснащенного простейшей пищалкой, большинство современных WinCE-моделей могут воспроизводить качественный звук. В сочетании с цветным экраном это дает возможность смотреть видео на карманном компьютере. Основной сложностью будет ограниченный объем оперативной памяти, поэтому полноценный видеофильм в КПК не загрузишь.Конечно, и требуемые для решения таких задач вычислительные мощности, и применение ОС Windows приводит к необходимости оснащать компьютер быстрым процессором и большим объемом ОЗУ. Тактовая частота процессора колеблется от 100 до 200 МГц, а объем памяти — от 16 до 32 Мбайт.Более неприятным следствием большой вычислительной мощности является высокое энергопотребление.Расширение и связь с внешним миром у этого семейства КПК происходят несколькими способами. Синхронизация с настольным компьютером осуществляется через интерфейс USB или RS-232 (COM), связь с периферией и мобильными телефонами — через инфракрасный порт. Объем памяти можно расширить с помощью CompactFlash-карты.Ключевые особенности платформы Windows CE:- Максимально совместима с настольной Windows.- Широкая поддержка цвета, большие мультимедийные возможности.- У всех КПК большой объем оперативной памяти, которая может быть использована для хранения данных.- Существуют клавиатурные и бесклавиатурные модели.- Большая масса, высокое энергопотребление, менее стабильная и более требовательная к ресурсам операционная система.Англо-русский универсальный дополнительный практический переводческий словарь И. Мостицкого > Windows CE
20 EDI
- электронный обмен информацией
- электронный обмен данными; безбумажная технология
- электронный обмен данными
- электронный интерфейс данных
- электронный (деловой, коммерческий) обмен данными
- модель расширенного канала
электронный (деловой, коммерческий) обмен данными
Процесс ведения дел с помощью набор стандартизированных форм и форматов данных.
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
EN
электронный интерфейс данных
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
электронный обмен данными
ЭОД
Электронный обмен деловыми документами между компьютерными программами различных компаний в стандартизованной форме.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
электронный обмен данными; безбумажная технология
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
электронный обмен информацией
Электронный обмен информацией представляет собой передачу электронными средствами связи от одного компьютера к другому коммерческих, транспортно-экспедиторских, административных и других сведений с использованием согласованных типовых кодов
[[Англо-русский словарь сокращений транспортно-экспедиторских и коммерческих терминов и выражений ФИАТА]]Тематики
EN
01.05.24 модель расширенного канала [ extended channel model]: Система кодирования и передачи как байтов с данными сообщения, так и управляющей информации о сообщении, в пределах которой декодер работает в режиме расширенного канала.
Примечание - Управляющая информация передается с использованием управляющих последовательностей интерпретации в расширенном канале (ECI).
<2>4 Сокращения1)
1)Следует учитывать, что в соответствии с оригиналом ИСО/МЭК 19762-1 в данном разделе присутствует сокращение CSMA/CD, которое в тексте стандарта не используется.
Кроме того, сокращения отсортированы в алфавитном порядке.
Al
Идентификатор применения [application identifier]
ANS
Американский национальный стандарт [American National Standard]
ANSI
Американский национальный институт стандартов [American National Standards Institute]
ASC
Аккредитованный комитет по стандартам [Accredited Standards Committee]
вес
Контрольный знак блока [block check character]
BCD
Двоично-десятичный код (ДДК) [binary coded decimal]
BER
Коэффициент ошибок по битам [bit error rate]
CRC
Контроль циклическим избыточным кодом [cyclic redundancy check]
CSMA/CD
Коллективный доступ с контролем несущей и обнаружением конфликтов [carrier sense multiple access with collision detection network]
CSUM
Контрольная сумма [check sum]
Dl
Идентификатор данных [data identifier]
ECI
Интерпретация в расширенном канале [extended channel interpretation]
EDI
Электронный обмен данными (ЭОД) [electronic data interchange]
EEPROM
Электрически стираемое программируемое постоянное запоминающее устройство [electrically erasable programmable read only memory]
HEX
Шестнадцатеричная система счисления [hexadecimal]
INCITS
Международный комитет по стандартам информационных технологий [International Committee for Information Technology Standards]
LAN
Локальная вычислительная сеть [local area network]
Laser
Усиление света с помощью вынужденного излучения [light amplification by the stimulated emission of radiation]
LED
Светоизлучающий диод [light emitting diode]
LLC
Управление логической связью [logical link control]
LSB
Младший значащий бит [least significant bit]
МНЮ
Аккредитованный комитет по отраслевым стандартам в сфере обработки грузов [Accredited Standards Committee for the Material Handling Industry]
MSB
Старший значащий бит [most significant bit]
MTBF
Средняя наработка на отказ [mean time between failures]
MTTR
Среднее время ремонта [mean time to repair]
NRZ
Без возвращения к нулю [non-return to zero code]
NRZ Space
Кодирование без возвращения к нулю с перепадом на нулях [non-return to zero-space]
NRZ-1
Кодирование без возвращения к нулю с перепадом на единицах [non-return to zero invert on ones]
NRZ-M
Запись без возвращения к нулю (метка) [non-return to zero (mark) recording]
RTI
Возвратное транспортное упаковочное средство [returnable transport item]
RZ
Кодирование с возвратом к нулю [return to zero]
VLD
Светоизлучающий лазерный диод [visible laser diode]
<2>Библиография
[1]
ИСО/МЭК Руководство 2
Стандартизация и связанная с ней деятельность. Общий словарь
(ISO/IECGuide2)
(Standardization and related activities - General vocabulary)
[2]
ИСО/МЭК 2382-1
Информационные технологии. Словарь - Часть 1. Основные термины
(ISO/IEC 2382-1)
(Information technology - Vocabulary - Part 1: Fundamental terms)
[3]
ИСО/МЭК 2382-4
Информационные технологии. Словарь - Часть 4. Организация данных
(ISO/IEC 2382-4)
(Information technology - Vocabulary - Part 4: Organization of data)
[4]
ИСО/МЭК 2382-9
Информационные технологии. Словарь. Часть 9. Передача данных
(ISO/IEC 2382-9)
(Information technology - Vocabulary - Part 9: Data communication)
[5]
ИСО/МЭК 2382-16
Информационные технологии. Словарь. Часть 16. Теория информации
(ISO/IEC 2382-16)
(Information technology - Vocabulary - Part 16: Information theory)
[6]
ИСО/МЭК 19762-2
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
(ISO/IEC 19762-2)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media (ORM))
[7]
ИСО/МЭК 19762-3
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
(ISO/IEC 19762-3)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification (RFID)
[8]
ИСО/МЭК 19762-4
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Основные термины в области радиосвязи
(ISO/IEC 19762-4)
(Information technology-Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 4: General terms relating to radio communications)
[9]
ИСО/МЭК 19762-5
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
(ISO/IEC 19762-5)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[10]
МЭК 60050-191
Международный Электротехнический Словарь. Глава 191. Надежность и качество услуг
(IEC 60050-191)
(International Electrotechnical Vocabulary - Chapter 191: Dependability and quality of Service)
[11]
МЭК 60050-702
Международный Электротехнический Словарь. Глава 702. Колебания, сигналы и соответствующие устройства
(IEC 60050-702)
(International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[12]
МЭК 60050-704
Международный Электротехнический словарь. Глава 704. Техника передачи
(IEC 60050-704)
(International Electrotechnical Vocabulary. Chapter 704: Transmission)
[13]
МЭК 60050-845
Международный электротехнический словарь. Глава 845. Освещение
(IEC 60050-845)
(International Electrotechnical Vocabulary - Chapter 845: Lighting)
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа
Англо-русский словарь нормативно-технической терминологии > EDI
Страницы- 1
- 2
См. также в других словарях:
набор текста — (Text composing) Создание текстовых форм с помощью компьютера, фотонабора, металлического машинного или ручного набора и пр. Последовательный процесс подставления в строку букв, цифр, знаков препинания и др. знаков, включая межсловные пробелы … Шрифтовая терминология
набор текста — Создание из текста оригинала текстовых форм с помощью компьютера, фотонабора, металлического машинного или ручного набора и пр. [http://ofyug.ru/useful/abc/529] Тематики полиграфия … Справочник технического переводчика
набор — а; м. 1. к Набрать набирать (2, 4 5 зн.). Н. студентов в институт. Н. высоты. Сдать книгу в н. 2. Совокупность предметов, составляющих что л. целое. Н. мебели, кухонной посуды, бокалов. Косметический н. 3. Типогр. Совокупность знаков, букв, цифр… … Энциклопедический словарь
набор текста — Формирование текста оригинала и создание из него текстовых форм с помощью компьютера, фотонабора, ручного или монотипного металлического набора и пр … Краткий толковый словарь по полиграфии
Система охлаждения компьютера — У этого термина существуют и другие значения, см. Система охлаждения. Система охлаждения компьютера набор средств для отвода тепла от нагревающихся в процессе работы компьютерных компонентов. Тепло в конечном итоге может утилизироваться: В… … Википедия
Начальная загрузка компьютера — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
Архитектура компьютера — Для улучшения этой статьи желательно?: Добавить иллюстрации. Викифицировать статью. Архитектура вычислительной машины (Архитектура … Википедия
клавиатура{ компьютера} — набор клавиш, расположенных в определённом порядке на пульте (панели) компьютера и обеспечивающих ручной ввод текстовой и(или) числовой информации (как правило, с визуальным контролем на экране дисплея, монитора) и управление процессом её… … Энциклопедия техники
компьютерный набор текста — Набор текста с помощью клавиатуры компьютера. [http://www.morepc.ru/dict/] Тематики информационные технологии в целом EN cold typetext origination … Справочник технического переводчика
text composing — Набор текста (Text composing) Создание текстовых форм с помощью компьютера, фотонабора, металлического машинного или ручного набора и пр. Последовательный процесс подставления в строку букв, цифр, знаков препинания и др. знаков, включая… … Шрифтовая терминология
Галилео (программа) — У этого термина существуют и другие значения, см. Галилео. Галилео Жанр научно популярная развлекательная программа Режиссёр(ы) Кирилл Гаврилов, Елена Калиберда Редактор(ы) Дмитрий Самородов Производство Телеформат ( … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский